1 使用55075器件測試齒輪齒感測
最好的鐵靶由冷軋低碳鋼製成,燒結金屬靶也可以使用,但必須注意確保材料成分和密度的一致性。
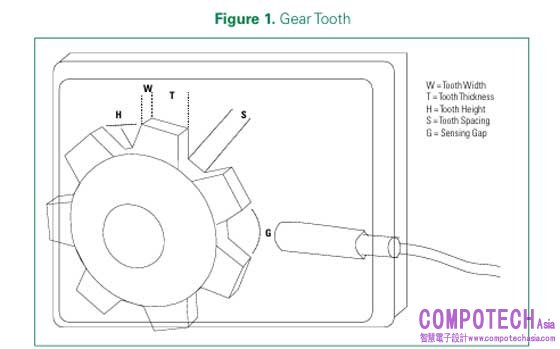
圖1 齒輪齒
Littelfuse 器件是一種可自動調整的數位輸出齒輪速度感測器。感測器與齒輪齒之間的感測距離受多種因素的影響,包括齒輪齒的尺寸、齒輪的黑色金屬等級以及感測器與齒輪的對齊情況。通常情況下,齒和槽越大,感應氣隙就越大。為獲得最佳性能,感測器應盡可能靠近目標。理想情況下,氣隙應小於1毫米。根據齒輪的幾何形狀,感測器的感應距離可能達到2毫米。
一般齒輪指南應考慮以下示例:
W=4mm S=5mm
T=6mm G=1.5mm典型值
H=4mm
對於齒形尺寸較小的齒輪,感測間隙通常為0.5至1.0毫米。在最終選擇之前,最好根據具體齒輪對感測器進行評估。
目標的齒或槽應切割成略微傾斜的角度,以盡量減少目標經過感測器時從金屬到空氣過渡的突然性。Littelfuse輪齒感測器的典型氣隙在1-1.5毫米之間。 Littelfuse 55075包含一個用於下沉輸出的內部上拉電阻器。
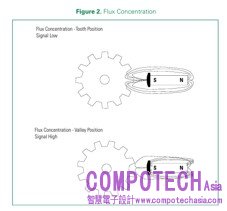
圖2 通量濃度
許多行業都需要檢測黑色齒輪的速度和位置。幾十年來,人們一直在尋求將重複通過的齒轉換為電脈衝的能力。純機械系統在使用過程中存在磨損和故障問題,因此僅限於低速和低佔空比應用。霍爾效應齒輪齒感應利用霍爾元件來感應磁鐵與通過的鐵質齒輪齒之間氣隙中的磁通量變化。透過對霍爾訊號進行數位處理,可以獲得以下幾個優勢。峰值檢測、峰值保持和電平比較均以數位方式完成。與最後一個齒輪齒和波谷相對應的最大和最小霍爾訊號會被無限期地記憶下來,而不會出現模擬技術所產生的漂移。然後,電平比較將適應最後一個峰值。這就是真正的零速自適應速度感測器。它不受方位要求的影響,可以追蹤齒輪速度直到運動停止。接通電源後,它將立即偵測到下一個輪齒的第一個邊緣。數位訊號處理確實會帶來量化的不確定性,在速度較大時這種不確定性會更大。曲柄位置感測器等對定時要求極高的產品在高速運轉時可能會因精度下降而受到影響。
為了用霍爾效應感測器檢測通過的齒輪齒,必須提供一個磁性能源。一個簡單的方法是佈置一塊永久磁鐵,使磁化軸指向齒輪齒的表面。當齒在磁鐵表面移動時,磁通量會被鐵鋼結構提供的低磁阻路徑吸引。
當發生這種情況時,霍爾元件在感測器表面和齒輪齒之間測量到的磁通密度就會增加。利用向量磁場的各種屬性及其不斷變化的性質來創建零速霍爾效應齒輪齒形感測器的方案已經開發了很多,有些還獲得了專利。齒輪齒規格:

表1 建議操作條件,55075齒輪齒
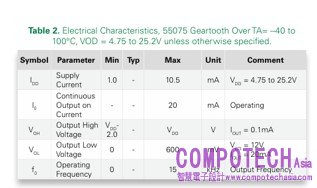
表2 電氣特性,55075齒輪齒超過TA=--40~100°C,VOD=4.75至25.2V,除非另有規定。
2 3線霍爾感測器: 55100, 55140
這些感測器採用CMOS技術,由霍爾板、主動穩定電路、比較器和汲極開路輸出組成。
輸出為有源低反相,大多數應用需要外接上拉電阻。電源電壓和上拉電壓不必相同。可以使用標稱電壓為0V至24V的任何上拉電壓。上拉電阻值僅受溫度下最大輸出漏電流 10uA和最大推薦輸出電流20mA的限制。
磁鐵的極性對霍爾感測器非常重要。 “開關型 "霍爾感測器由南極啟動。應將正確的磁極置於感測器的激活面上。
此系列感測器採用斬波穩定技術。此特性可在電源電壓、溫度和機械應力變化時提供幾乎恆定的磁特性。為了實現這項技術,內部振盪器會在基準取樣和主動磁感測器取樣之間切換放大器電路。振盪週期稱為 TOSC,為幾微秒(請參閱規格書)。感測器的數位輸出可能會延遲到這個量級。在大多數應用中,這種極小的延遲並不重要,斬波電路提供的穩定性遠遠超過了這種延遲。
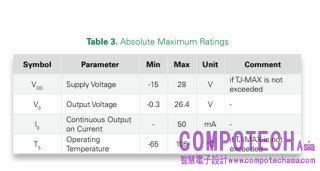
表3 絕對最大額定值
電氣特性,55100 3線,55140 3線(注2)超過TA=-40至90°C,VDD=3.8至24.0V,除非另有規定指定。
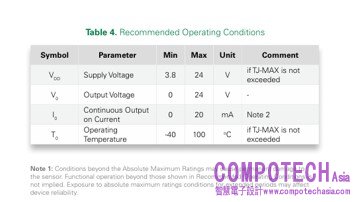
表4 推薦工作條件
註1:超過絕對最大額定值的條件可能會導致感測器永久損壞。非暗指超出建議操作條件中所示的功能操作。長時間暴露在絕對最大額定值條件下可能會影響設備的可靠性。
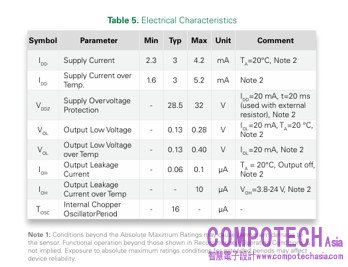
表5 電氣特性
註1:超過絕對最大額定值的條件可能會導致感測器永久損壞。非暗指超出建議操作條件中所示的功能操作。長時間暴露在絕對最大額定值條件下可能會影響設備的可靠性。
3 類比霍爾感測器:55100-AP, 55140-AP
模擬霍爾感測器是利用霍爾效應測量磁場的半導體裝置。它們通常使用CMOS技術實現,因此可以對各種感測器參數進行編程和自訂。這些感測器的一些主要特點和特性如下:
1) 客戶預設: 模擬霍爾感測器可預設為與特定磁場強度(以高斯為單位)相對應的特定輸出電壓。這樣就可以根據應用的具體要求定制感測器。
2) 可程式設計:感測器電子元件可程式設計,可定制不同的參數,如磁場範圍、靈敏度、輸出電壓範圍和溫度係數。這種靈活性使感測器適用于各種應用。
3) 比率輸出: 感測器的輸出電壓以電源電壓為基準。這意味著輸出值與相對於電源電壓的磁場強度成正比。即使電源電壓發生波動,比率輸出也能提供穩定、準確的測量。
4) 容錯性: 感測器設計用於處理不同的故障條件,如電源開路、接地開路或電源對地或電源電壓過壓/欠壓。這確保了即使在具有挑戰性的情況下也能可靠運行。
5) 總誤差: 感測器的總誤差(包括所有誤差源)在整個工作電壓和溫度範圍內小於 2%。這一精度水準使感測器適用于精確測量應用。
總之,採用CMOS技術的模擬霍爾感測器為汽車、工業和消費電子等各種行業和應用的磁場測量提供了一種多功能、可靠的解決方案。
AP 系列類比霍爾感測器的標準程式設計具有2.5 Vdc的預設電壓輸出,隨著磁場強度的增加(磁極接近感測器面),電壓輸出下降至約0 Vdc。定制可通過程式設計介面和專用程式設計軟體實現。
4 3線TMR感測器54100, 54140
這些TMR(隧道磁阻)感測器採用CMOS技術,由TMR傳感元件、帶隙調節器、比較器和推挽輸出組成。
輸出為低電平有效下沉和高電平有效上源。建議的最大輸出電流為6 mA。
全極感測器需要一個北磁極或南磁極才能運作。一旦超過BOP臨界值,任一磁極都會啟動感測器(輸出沉入接地線);而當超過BRP臨界值時,任一磁極都會停用感測器(輸出源極至 Vcc)。磁極應位於感測器與有線側相對的一側。
表6 絕對最大額定值54100、54140(注2)(@TA=+25℃,除非另有規定。)
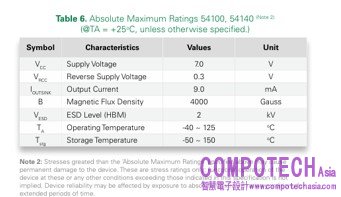
註2:大於上述「絕對最大額定值」的應力可能會對裝置造成永久損壞。這些只是壓力評級;非暗指裝置在這些或任何其他超過本規範所示條件的條件下的功能操作。裝置可靠性可能會受到長時間暴露在絕對最大額定值條件下的影響。

表7 電氣特性54100、54140(@TA=+25℃,VCC=3.0V)
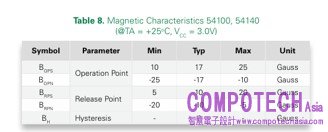
表8 磁特性54100、54140(@TA=+25℃,VCC=3.0V)
5 定制設計感測器
Littelfuse專注于滿足客戶的特殊要求,Littelfuse提供全方位的內部工程服務能力。
6 EMC 和 ESD
對於有電源線干擾或輻射干擾的應用,建議使用串聯電阻器和電容器。串聯電阻和電容器應盡可能靠近感測器。根據產品標準DIN 40839,採用這種佈置的應用通過了EMC測試。
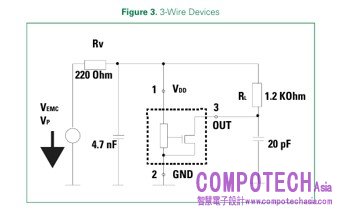
圖3 3線設備
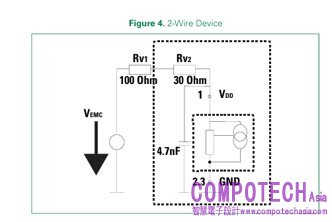
圖4 2線設備
7 過電壓保護,55075除外
連續供電的絕對最大額定電壓為24 V。如果電源電壓超過28 V的齊納電壓,設備的電流消耗就會增加。超過齊納電壓的電壓只能在短時間內承受。為了保護霍爾感測器免受過壓影響,需要外接一個串聯電阻。該串聯電阻上的壓降隨著電源電流的增加而增大。齊納二極體與(外部)串聯電阻器組合後可作為箝位元裝置,將設備的電源電壓限制在齊納電壓範圍內。
8 反向電壓保護,55075除外
最大反向電壓為-15 V。舉例來說,如果設備與12 V的汽車電源一起使用,可能會出現連接錯誤,但不會造成損壞。與過壓保護一樣,使用外部元件可以提高該值。
9 温度、电压和功率
與所有固態半導體器件一樣,霍爾和TMR感測器也有一個最高工作結溫。工作結溫取決於感測器耗散的功率(電壓乘以電流)、封裝的熱阻、安裝配置產生的任何散熱效果、任何空氣流動以及環境(空氣)溫度。由於內部功率耗散和自熱,在電源電壓較高時,可能需要降低最高工作溫度,以便將結溫限制在可接受的值。
10 ESD预防措施
Littelfuse半導體產品對靜電放電(ESD)敏感。在處理霍爾效應感測器時,始終遵循ESD控制程式。