3D影像系統促進工業自動化
前言:
為在廠房自動化內追求安全與人體工學,以簡易且符合成本效益的方式控制廠區設備,自是一大要務,藉由手勢的無觸控機制,能夠建立更安全、更直覺的人機介面,此外,這些3D系統亦可指引
為在廠房自動化內追求安全與人體工學,以簡易且符合成本效益的方式控制廠區設備,自是一大要務,藉由手勢的無觸控機制,能夠建立更安全、更直覺的人機介面,此外,這些3D系統亦可指引與控制機器人系統。本文介紹數種3D影像方法的基礎,包括時差測距 (ToF)、結構光、立體視覺等,再從功能與安全兩種角度切入,分析時差測距如何改善各種自動化應用。
3D影像方法
立體視覺原則與人類視覺相同,以兩具精準調校的標準2D相機(雙眼)捕捉景色,鏡頭同時拍下畫面後,經系統控制器(腦部)處理與分析,判斷視野內每個物件的景深。這套系統優點在於運用現成市售相機,可提供最高解析度所需;此外,相機價格相對透明與低廉,不過缺點在於:
•實際調校非常重要,也可能所費不貲
•影像處理演算式極為複雜,若需即時完成,需要功能更強大的處理器,尤其在工廠內,準確調校可能是一大難題
•實際調校非常重要,也可能所費不貲
•影像處理演算式極為複雜,若需即時完成,需要功能更強大的處理器,尤其在工廠內,準確調校可能是一大難題

圖1 透過手勢辨識管理的廠房控制室(資料來源:德州儀器)
大多數人想像3D影像時,腦海中都浮現結構光系統,目前以微軟的Kinect為主,透過眾多光線折射形成影像,再使用一部標準2D相機拍攝畫面,再由處理器修改反射影像次序,產生畫面中物件的景深。這種系統的優點在於,若運用高畫素相機與精密的光影模式,可產生非常精準的景深圖;缺點在於必須分析多張影像,才能判斷景深,故勢必會延遲。此外,影像處理必須修改畫素,造成相機原本捕捉的影像解析度降低。由於光線必須保持一定距離,影像處理系統才能正確解讀光線反射結果,對於近距離互動應用不利;最後一項缺點與立體視覺相仿,光源與相機系統必須準確調校,才能分析得當。
時差測距系統以恆久不變的光速為基礎,光源來自紅外線脈衝,並由特殊景深感測裝置接收反射能量,其中採用特別畫素架構,能瞭解每一畫素位置的接收能量相位,再對比已知發射相位,最後將相位換算為時間,由於能量是以光速傳輸,即可再換算為距離。
相較於其他技術,時差測距最大優點在於,畫面拍攝後,計算景深時不需後續處理,其可避免時間延遲、排除採用強大後處理系統的相關成本,並確保在景深圖內,維持感測器原始解析度。另一項優點在於,因為相對相位才是重點所在,光源與接收器之間的機械調校與配置並非成敗關鍵。
時差測距規模頗具彈性,大多只需改變光源強度、光學視野、發射器脈衝頻率即可,適合在約一公尺外追蹤手指的近距互動系統,或是在虛擬戰場追蹤多名玩家的遠距互動遊戲系統。專業景深相機成本高於其他影像方法使用的標準2D相機,不過因為機械需求成本較低,後處理系統成本較低,故可相互抵銷。
如表1所示,時差測距系統的綜合表現、成本、應用難易度較佳,立體視覺系統可使用標準高解析度相機,故最適合製作3D電影,任何應用若重視低延遲性、準確追蹤手勢、中級精準掃描,時差測距即為最合適選項。
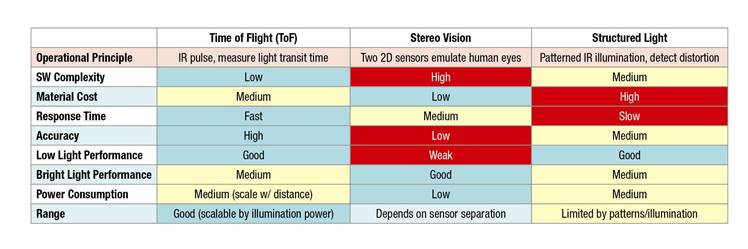
表1:三種系統優缺點比較表(資料來源:德州儀器)
無論使用何種方法,一旦系統獲得景深資訊,後續資料流皆會相同。3D影像系統需要兩種等級的軟體,中介軟體用來分析景深圖,辨別物件與模式,汲取終端應用所需的重要資料點。例如在手勢應用內,中介軟體辨別肢體主要部位(雙手、頭部、雙腳、手指等),再建立追蹤軀體的資料點;在掃描應用內,需汲取資料包括物件表面彎曲點。應用層接收中介軟體匯整的追蹤資料後,執行使用者想要的功能,例如移動工具、啟動/停止程序、翻轉物件檢查等。
工業自動化的人機介面
由於製造業使用的系統日益複雜,作業員安全與使用難易度成為焦點,作業員可能得同時管理多種系統,若以手勢取代觸控,工作將更簡單、更安全,也能專心觀察移動中的設備,不必分心顧慮控制面板,如此更迅速發現問題,並立刻暫停程序,不需走至控制系統操作按鈕、開關或控制桿。試想若只需舉起雙拳,或是讓雙臂在胸前交叉,即可停下機器,可省下多少時間;又或是藉由手指移動,即可將精密工具移動至理想位置,不再受限於控制機台上的把手,能夠在最理想的視線角度以立體操作,取代人工移動工具,也避免讓作業員受到工具傷害。
機器人控制
機器人視覺已發展一段時間,若能使用真正的3D資訊,而非2D影像,機器人動作將準確許多,時差測距系統因為延遲時間短,又不需精準機械調校,故最為合適。反觀立體視覺與結構光均需要精準調校,機器人又常以高速移動,不時出現機械震動,所以很容易造成這兩種系統偏差、降低表現、需要更常維護與調整系統。另一方面,時差測距延遲時間短,適合更快速的行動與決策,德州儀器時差測距系統可支援最高每秒120格的拍攝速率,讓景深資訊產生速度比市售其他解決方案快四倍以上。
掃描與檢查
如上所述,結構光很適合用於相當精確的掃描系統,但假若掃描精準度需求較低,時差測距系統便已足夠。尤其在許多製造業環境裡,都希望最終放行與否的決定能夠自動化,時差測距既精準、延遲時間又短,能夠快速做出決定,並增加製造業處理量。無論採用何種方法,掃描系統都可能需要翻轉物件檢查,或在物件周圍設置影像系統,而工廠內常出現各種震動或衝擊,故機械需求可能限制結構光系統應用範圍。
工廠自動化可運用3D影像,增進系統效能與確保作業員安全,手勢控制功能有助作業員專注於操作程序,而非控制面板,並建立更自然的機器介面。機器視覺若能瞭解景深與XY座標,機器人系統行動將更加準確;3D掃描系統可促進物件量測及分析,德州儀器等企業均推出3D時差測距系統,為工廠自動化與機器控制創造前所未有的新功能。