業界對三種主要感測器(攝像頭、雷達和LIDAR)在汽車中的不同作用,以及它們各自如何滿足先進駕駛輔助系統(ADAS)和自動駕駛的感測需求仍然存在一些困惑。
最近,我和我的一個朋友進行了一次有趣的討論,他知道我在研究用於ADAS系統和自動駕駛車輛(AVs)中雷達的TI毫米波(mmWave)感測器。
每當他讀到自動駕駛汽車在不同駕駛環境下(比如障礙物檢測)運行情況的文章時都會不失時機地取笑我。其中一次的對話如下:
Matt:“如果那輛車搭載有LIDAR的話,就能輕鬆識別出車道中間的物體。”
我:“我依然不同意這樣的看法。”
Matt:“什麼?!你為什麼不同意?那輛車上裝有一個攝像頭感測器和一個雷達感測器,但ADAS系統仍然完全未能感測到車道中間的那輛車。”
我:“當讀到這些最近發生的事件時,你就會注意到如果攝像頭經常暴露在刺眼的強光和其他因素之下,就會導致其看不到路上的物體。它們對高對比的光線和能見度低的情況較為敏感,如大霧、雨雪天氣。在這種情況下,雷達感測器可能確實識別了目標。”
Matt:“儘管如此,我們仍會遇到這些ADAS和AV系統似乎很難應對的不同情況。那麼問題到底出在什麼地方呢?”
我:“ADAS的決策系統似乎依賴於作為主感測器的攝像頭來判斷目標是否真的存在,或者是否為假警報。”
Matt:“那麼,車載雷達和攝像頭就不值得信任咯。所以只能將LIDAR作為唯一可靠的感測器了。我說的沒錯吧?”
我:“不完全對。雖然LIDAR對能見度的敏感度不如攝像頭,但它對霧、雨、雪等天氣情況敏感。此外,LIDAR的成本還很高,可能導致其最初只能在相對高端的4級和5級自動駕駛車輛上使用。”
Matt:“這就是了!沒有一種感測器可以使自動駕駛車輛真正可靠。我們必須將這三者結合使用,但這也意味著自動駕駛車輛的價格會非常貴。”
我:“你只說對了一部分。4級和5級自動駕駛車輛可能需要攝像頭、LIDAR和雷達這三種感測器來提供高可靠性和全自動駕駛體驗。但是,對於更多需要部分自動駕駛且已經開始大規模量產的2級和3級經濟型車輛來說,使用TI毫米波感測器的成像雷達能夠實現高性能和成本效益,並能夠廣泛採用ADAS功能。”
那麼,什麼是成像雷達呢?
正如我向Matt解釋的那樣,成像雷達是雷達的一個子集,因其高角解析度能夠提供清晰的圖像而得名。
成像雷達由一個感測器配置啟用,其中多個低功率TI毫米波感測器級聯在一起,且作為一個單元同步運行。它具有多個接收和發射通道,能夠顯著提高角解析度和雷達距離性能。當毫米波感測器級聯在一起時,可以使用集成移相器來創建波束賦形,從而達到400米的擴展範圍。圖1顯示了評估模組上的級聯毫米波感測器及其天線。
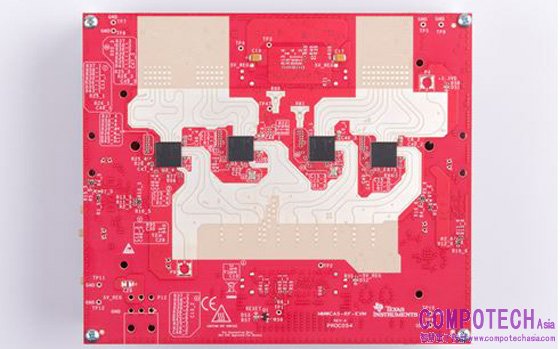
圖1:一種具有四個級聯TI毫米波感測器的成像雷達評估模組
用於成像雷達的毫米波技術
典型的雷達感測器直到最近才被視為車輛中的主感測器,其主要原因在於角解析度性能較為有限。
角解析度是指在相同範圍內和相同相對速度下區分物體的能力。
一個凸顯成像雷達感測器優勢的常見用途是能夠以高解析度識別靜態物體。典型的毫米波傳感器具有高速度、高距離解析度的性能,可以很輕鬆地識別和區分運動物體,但對靜態物體來說,其識別能力卻非常有限。
例如,為了讓感測器“看到”車道中間停下來的車輛並將其與燈杆或柵欄區分開來,感測器需要在仰角和方位角上都有一定的角解析度。
圖2顯示了一輛被困在隧道中的車,車內不斷冒煙。該車輛停在約100米遠處,隧道高度為3米。

圖2:來車的前雷達需要足夠高的角解析度來區分隧道和停止車輛。毫米波感測器可以穿透任何能見度情況,比如煙。
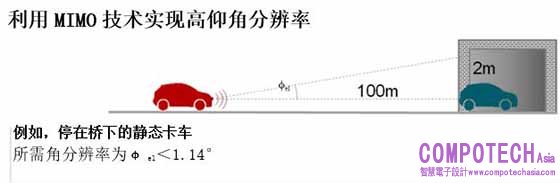
圖3:毫米波感測器如何利用多輸入多輸出(MIMO)雷達實現高仰角解析度。
為了識別圖2所示隧道中的車輛,感測器需要將其與隧道頂棚和壁區分開來。
實現場景分類需要利用這些仰角和方位角解析度:
ɸ (仰角) = 反正切 (2 m/100 m) = 1.14度
ɸ (仰角) = 反正切 (3.5 m/100 m) = 2度
其中,2 m是隧道高度減去車輛高度的值,100 m是帶成像雷達的來車與停在隧道內的車輛之間的距離,3.5 m是停在隧道內的車輛與隧道壁之間的距離。
在某些天氣和能見度情況下,依賴於其它光學感測器可能具有挑戰性。煙、霧、惡劣天氣以及明暗對比都是具有挑戰性的能見度情況,這些情況會抑制光學被動和主動感測器,如攝像頭和LIDAR,從而導致這些感測器可能無法識別目標。然而,在惡劣的天氣和能見度情況下,TI毫米波感測器仍能保持強勁的性能。
目前,成像雷達感測器是唯一能在各種天氣和能見度情況下保持強勁性能的感測器,其在方位角和仰角上都能達到1度的角解析度(使用超解析度演算法計算數值時甚至更低)。
結論
採用TI毫米波感測器的成像雷達具有很高的靈活性,能夠以非常高的解析度感知和分類近場中的物體,同時能夠在400米以外的遠場中跟蹤目標。這種成本高效的高解析度成像雷達系統能夠使2級和3級ADAS應用以及高端4級和5級自動駕駛車輛成為可能,並可用作車輛中的主感測器。
其他資源
• 瞭解更多關於TI成像雷達的信息。
• 觀看視頻:毫米波汽車成像雷達系統——遠距離探測
• 閱讀博文:我們達到預定的目標了嗎?對自動駕駛的期望與現實的對比
• 從“使用77 GHz毫米波感測器的汽車成像雷達參考設計”開始您的設計。
• 瞭解更多關於TI成像雷達的信息。
• 觀看視頻:毫米波汽車成像雷達系統——遠距離探測
• 閱讀博文:我們達到預定的目標了嗎?對自動駕駛的期望與現實的對比
• 從“使用77 GHz毫米波感測器的汽車成像雷達參考設計”開始您的設計。